Antenna tracking controller
Introduction
An antenna tracking system allows an antenna (e.g. 4 metre dish) to be steered in the direction of a satellite passing overhead. The dynamics are such that this process requires at least two degrees of freedom for a tracking head. Traditionally, tracking heads have adopted the Azimuth/Elevation principle in which the elevation angle is limited to +90 degrees from the horizontal position and the Azimuth axis can cover at least 360 degrees of travel. More recently, X-Y heads have become available which allow more smooth tracking of signals directly overhead without the ambiguities associated with the azimuth elevation design.
![[X-Y Tracking Head]](images/xy_head.jpg)
|
X-Y Tracking Head
Axis controller
Anticyclone Systems offers a unique servo motor control solution for both traditional Azimuth/Elevation and X-Y type tracking heads. The system has been designed from the ground up with performance in mind. Unlike some other controllers, the system can perform axis tracking whilst executing other tasks such as host command invocation (including position requests), time and station position determination and the normal limit sensor monitoring.
Servo Motor Control Processor
The Servo Motor Control Processor (SMCP) is a stand alone unit which directly interfaces to servo motor amplifiers, axis position encoders and axis limit sensors. The SMCP incorporates separate servo motor tracking loops for each axis and is controlled by a host computer via a single RS232 (or RS422) serial port interface.
All tracking events including position requests are time tagged with a resolution of 1ms. The SMCP can accept commands and return axis information whilst simultaneously performing all tracking functions. The system has a look-ahead table driven mode of tracking which supports host machines which are not able to process requests in real time.
A brief summary of the controller's capabilities are listed below:-
Twin Axis - stackable.
Fast axis tracking response (less than 2ms tracking loop time per channel).
On board profile generator for object tracking and manual control modes (10ms update rate).
Time tagged position requests (1ms resolution).
Time tagged current position returns (1ms resolution).
Differential quadrature encoder inputs for axis position determination.
GPS resolution of station position and time (UTC).
Differential voltage feed for servo amplifier (12 bit DAC).
Axis Controller GUI
The Anticyclone Systems Axis Controller GUI software allows the SMCP to be controlled and configured from a host computer. The GUI software presents the user with a simple interface which provides all the main capabilities on a single GUI window pane to allow fast user access to all features.
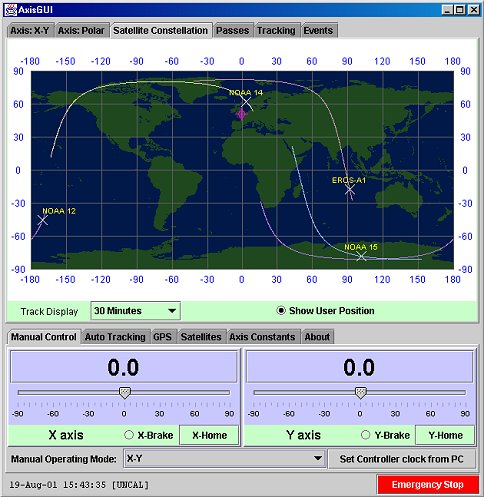
Axis Controller GUI
The software offers manual and automated tracking modes. The user can use on-screen sliders or enter values directly from the keyboard when the tracking head is required to be positioned manually. Two manual operating modes are available, one to allow individual X-Y axis control and the other to allow combined Azimuth-Elevation control.
Automated tracking involves supplying a stream of time tagged position and velocity events to the SMCP. The SMCP then tracks smoothly through these events in real time. The GUI can generate this stream of position and velocity events from several sources including a supplied disk file containing required position and velocity profiles, from satellite element sets for real time space vehicle tracking and from built in tracking sources such as the Sun Tracking mode used to assist in tracking head site alignment.
The GUI software can display the current tracking head position in either X-Y axis or Azimuth-Elevation displays. The GUI also offers a real time tracking error display which can show individual axis or combined axis tracking errors derived from information supplied by the SMCP.
For automated satellite tracking modes, the user is able to specify and maintain satellite element sets for space vehicle tracking and a real time display of current satellite positions including the projected ground track is provided. A satellite pass display shows the schedule of available satellite passes where the user can specify how passes are automatically selected if two or more satellites are in view at any one time.
For automated tracking modes, a system time offset can be applied and the user can always stop axis travel at any time with the emergency stop gadget which is always available for selection. The user also has control over individual axis brakes and for home axis calibration.
GPS time and station position resolved by the SMCP is available on a GPS display panel and the user is able to set non volatile SMCP configuration parameters such as specifying maximum platform dynamic limits and platform orientation offsets in three dimensions.
SMCP Adapter
![[SMCP Adapter]](images/SMCP_Adapter.jpg)
An SMCP Adapter interface is available which converts RS422 levels from the SMCP interface card to RS232 levels for direct connection to equipment that requires an RS232 interface (e.g. laptop and desktop PCs). In addition, the standard SMCP interface accepts a RS422 differential 1PPS input from a GPS receiver source and the SMCP adapter allows the generation of this differential signal from a single ended source available from most GPS receivers.
Please see our SMCP Product Guide for more details.